Pagina Prima > Producta > Systema Conveyor > Transeuntis Alvei Telescopici > Inclinatoria Telescopica Funicularis Conductor











1) Conveyor Belt Telescopico - Tipo Móvel com Subida
Conveyor belt telescopico pode carregar e descarregar mercadorias de forma segura e eficiente, e é adequado para encomendas expressas, sacos tecidos, caixas, bagagem, pneus, caixas plásticas, tambores de óleo, etc. Sua maior vantagem são as condições operacionais ergonômicas. O movimento geral do equipamento em qualquer direção pode ser realizado controlando o manípulo para alcançar a posição especificada pelo cliente. Em seguida, ao operar o botão, o movimento telescópico da máquina telescópica pode alcançar a posição requerida pelo operador, e facilmente e eficientemente completar o carregamento e descarregamento de mercadorias. O movimento geral e telescópico é rapidamente devolvido ao operador através de acionamento motorizado.
Praesertim, ambulatorium telescopium ad portandum et deponendum loca sine platformis aut clivibus idoneum est.
● Instrumentum potest movere horizontaliter ante, retro, laeva et dextra. Rotae anteriores etiam possunt rotari in omni directione. Motus totus manu impellitur vel ab externa fornice suppetit.
● Postquam praepositus locus adiit, quattuor pedes articularii demitti debent ut terram sustentent, ita ut praepositus locus libere extendat et retrahat ad designatum locum onerandi et deonerandi.

● Totum instrumentum per mechanicam hydraulicam elevare et demittere potest, laborem intensitatem onerandi et deonerandi minuentes.

2) Utilitates Ambulatorii Telescopici Loricati

● Facilis operatio: reducere distantiam manualis transportis materialium ante et retro, et minuere laborem corporalem.
● Efficiens operatio: calculata ex standardi velocitate onerandi 25-40 m/min, theorica maxima capacitas onerandi cartonum (800×600mm) per horam est 3.000 pieces.
● Standardis operatio: oneratio et in magazinum transferendo processus operationis standardis ordinate et effective, vitare confusionem et plenum operationem in loco.
● Parsimonia laboris: numerus laborantium ad onerandum potest minui plus quam dimidium originalis numeri.
● Tuta operatio: minuere frequentiam accidentium durante oneratione et deoneratione, et melius securitatem et sanitatem laborantium ad onerandum et deonerandum conservare.
● Meliorem imaginem corporatam praebere: Operatio standardis automatis equipmenti in linea assembly respondet requisitis modernarum entrepreneur et coniungi potest cum traditionalibus machinis in linea assembly.
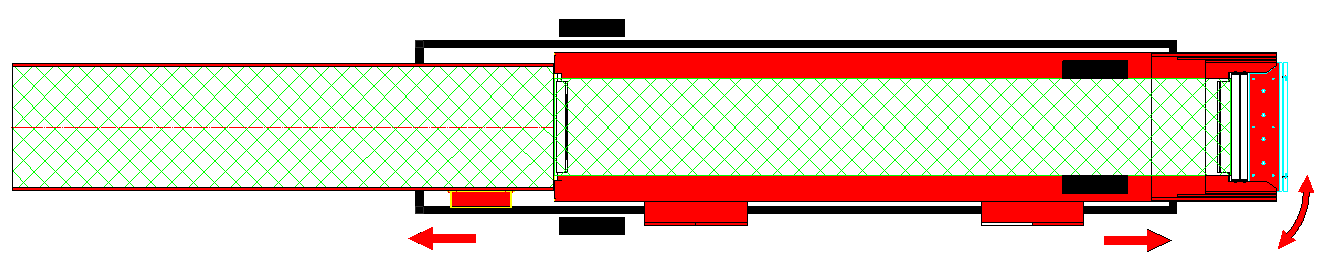
3) Structura Ad Referendum


4) Folia Data & exemplum delineationis
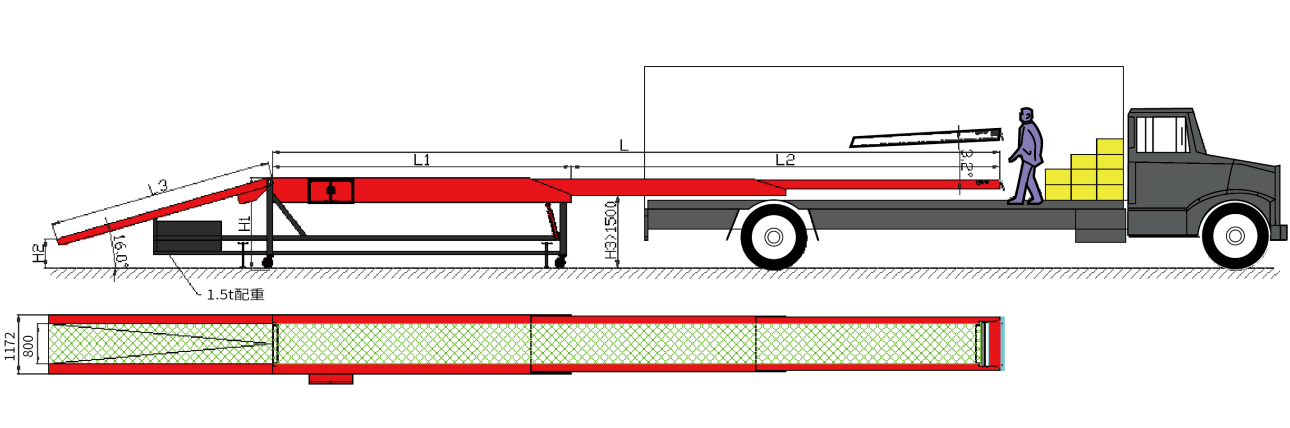
| Dimensiones Basic | |||||||||
| Numerus Modeli | Sectio | L1 (mm) | L2 (mm) | L (mm) | L3 (mm) | H1 (mm) - min | H2 (mm) | Largitudo Cinguli (mm) | Ponderis contrappeso(t) |
| SC-CT800S2M-6.0/4.9 | 2 | 6000 | 4900 | 10900 | 4500 | 600 | 750 | 800 | 0 |
| SC-CT800S3M-5.0/7.0 | 3 | 5000 | 7000 | 12000 | 4500 | 750 | 750 | 800 | 1.0 |
| SC-CT800S3M-6.0/8.6 | 3 | 6000 | 8600 | 14600 | 4500 | 750 | 750 | 800 | 1.0 |
| SC-CT800S4M-6.0/12.3 | 4 | 6000 | 12300 | 18300 | 4500 | 900 | 750 | 800 | 3.0 |
| SC-CT800S4M-7.0/14.0 | 4 | 7000 | 14000 | 21000 | 4500 | 900 | 750 | 800 | 4.0 |
| SC-CT800S5M-7.5/16.0 | 5 | 7500 | 16000 | 23500 | 4500 | 900 | 750 | 800 | 4.0 |
| Notae: 1) Hoc genus transporteris telescopicus idoneum est ad dockes onerandi sine platforma; 2) Plures dimensiones non-standard possunt fieri sur measure. | |||||||||
5) Aliquae informationes detailed:
| Informatio Fundamentalis | ||
| Non. | Elementum | Specificatio |
| 1 | Genus cinguli tractorii | Impulsio Motoris |
| 2 | Genus telescopicum | Impulsio Motoris |
| 3 | Genus movens | Motus manualis/Motus motorius |
| 4 | Directio deferendi | Ante et retro |
| 5 | Velocitas Transportandi | 25-45m/min, variabilis |
| 6 | Velocitas telescopica | 5-12m/min, variabilis |
| 7 | Capacitas onerandi praefixa | 60kg/m |
| 8 | Fontem electricitatis | Ut requisita tua |
| 9 | Genus interfacium cinguli | Alligatio fibulae ferreae |
| 10 | Materies tabulae formae | BS700MC ferrum alti mangani |
| 11 | Superficies curatio | Spargitum, color ut postulat custos |
| Informatio de Componentibus | |||
| Non. | Nomen Componentis | Specificatio | Notam |
| 1 | Cingulum | Bulla PVK resistens ad incisum (specialiter pro bullo conveyor telescopicus) | Ammeraal |
| 2 | Motor bullae | 2.2KW-3.0KW | SEW |
| 3 | Motor telescopicus | 0.75KW-1.1KW | SEW |
| 4 | Motor partis inclinatae | 1.5kw | SEW |
| 4 | Catena telescopia | 10A catena rotulorum | CHOHO |
| 5 | Tela | Rotuli globulorum in fossa profunda | HRB |
| 6 | Domus rotuli | UCFC209/UCF207 | TR |
| 7 | Rota Ductrix | ø110\/Ø80 | WANDA |
| 8 | Rota impulsionis | ø216 | SHUNTIAN |
| 9 | Rota tensio | tubus Ø83 sine iunctura rota conversio | SHUNTIAN |
| 10 | Inversor cinguli | 2.2KW | DELTA |
| 11 | Inversor telescopicus | 0.75kw-1.5kw | DELTA |
| 12 | PLC | Programmabilis Controller Logicae | Siemens |
| 13 | Puga | Pulsatio initii, pulsatio sagittae, pulsatio stop emergentis | SCHNEIDER |
| 14 | Commutator itineris | D4V-8108SZ-N | OMRON |
| 15 | Portacabos | Portacabos ingeniarius latus onerosus | RUIAO |
| 16 | Ducta lux | 6W | Sina notam |
| 17 | Cylindrus hydraulicus | ø63 foramen\/Ø40 foramen | JUNHONG |
| 18 | Unitas hydraulica | 2.2KW\/0.75KW | BUCHER |

Jus Copyrigt © SmartConvey Automation (Shanghai) Co., Ltd. Omnia Jura Servata - Politica Privata